第四届全球智能驾驶峰会|Innoviz 中国区总经理苏淑萍:激光雷达于智能驾驶车辆是工具,而非用来「炫富」| 激光( 三 )

文章插图
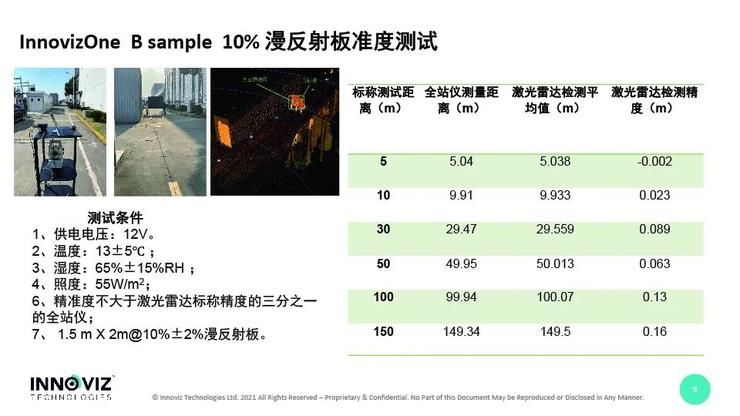
同时我们不仅需要看产品能测到多远,还要看能测多准,因为测得准是激光雷达的优势。
我们用10%漫反射板进行准度测试。测试的条件是:天气好,阳光比较灿烂,供电电压是12V,温度是13±5℃,湿度是65%±15%RH,照度是55W/㎡,精准度不大于激光雷达标称精度三分之一的全站仪,漫反射板尺寸是1.5m×2m的,从测试结果看,除了在最远距离有点问题外,其他距离的测试结果还是比较好的(这个问题可能和全站仪有关,我们后续会有进一步的分析)。
文章插图
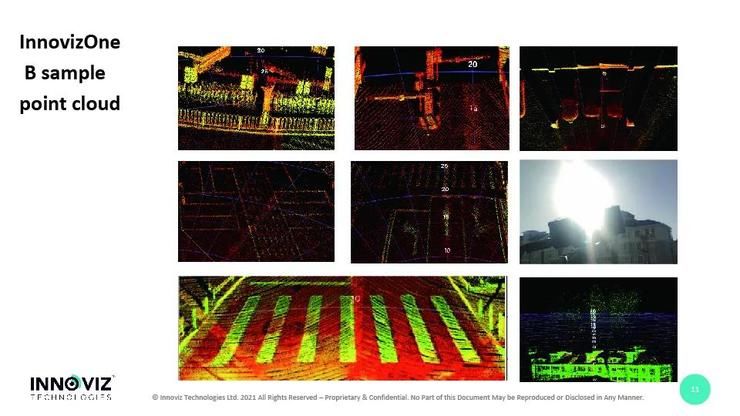
在测试的实时点云方面,产品对100多米外的行人、车辆以及雪糕筒等物体进行测试后获得的点云图像都是可用的,也就是说对算法是有效的。有些市场数据标榜可以看到非常远,但是其数据对于算法是不可用的。
同时我们也对路面和周围的道路环境采集了一些数据,可以看到,即使是地库入口非常细的横杆,我们检测出来的图像也是没有任何波动的直线,另外路上标志线和斑马线的识别,也是非常清晰。
另外很多客户会跟我们反馈说,他们以前用的设备,当在早上和傍晚有阳光直射时,激光雷达性能就会受到非常大的影响。
所以我们也做了这样的测试,在阳光直射环境下,点云图像还是会看到有噪点,但是这些噪点在做算法的时候,其实是很容易把它过滤掉,包括我们用我们公司的显示输出的时候,也可以增加置信度来直接过滤掉这些噪点。
但我们关注的是,阳光直射对我们激光雷达产品对目标物的检测到底有没有影响,如果因为有噪点的干扰,使得产品对目标物的检测有影响,那这个激光雷达的性能是要打问号的,但是从测试结果看,我们激光雷达产品的输出信号质量还是非常好的。
文章插图
【第四届全球智能驾驶峰会|Innoviz 中国区总经理苏淑萍:激光雷达于智能驾驶车辆是工具,而非用来「炫富」| 激光】前面讲的是一些技术和产品,而当产品到了真正量产化时,就要讲质量了。我们开发一款车规级激光雷达的目的,就是要满足车上的各种应用场景,要达到所有的车规级要求。
在测试方面,我们是从元器件开始,会花两年多的时间,去做各种测试。其实有很多工作不是可以全部靠OTA就能完成的,我们还是应该踏踏实实地把很多基础的事情做好,尤其是面对高速发展的市场,不走“捷”而不实的路径,是需要内心的坚持的。
在过去五年当中,我们只做了一个产品。我们的下一代产品是InnovizTwo,则是希望把价格做得更低,性能做得更好。怎么做到?我们还是在自研产品上做了很大的调整,尤其是MEMS振镜。
这也是整个行业对我们这个产品最大的疑问,因为MEMS振镜要把尺寸做大、转动的角度做大,性能就会下降,寿命就会下降,这就是一个很大的挑战,怎么能够在这两者之间做到“既、又”,这是我们接下来要做的努力。
接下来我给我们的主机厂打个广告。看这满满一屏的主机厂logo,也是2021年中国激光雷达市场热热闹闹的现状,我更希望在未来的几年中,激光雷达助力的高阶自动驾驶车辆能够为大众的出行服务。

文章插图
目前国内智能驾驶车辆对于激光雷达的应用,如果直白一点,还处于堆料的阶段。但我觉得激光雷达对智能驾驶车辆来说,应该是个能让智能驾驶车辆性能变得更强大、减少车辆事故的工具。
- 华为|重磅级新品官宣:华为全屋智能2.0将于7月4日发布 前代39999元起
- 电信|印度电信和IT部长:印度本土研发的5G技术有潜力赢得全球市场
- gtx|一款充满设计感的智能手机,体验LG V60,摄像头和屏幕都是亮点
- 无人驾驶|189元Ticwatch GTK智能手表上手评测:颜值、运动、电量集一身,香
- 阿维塔|dido E40s Pro智能手表:气泵式血压测量,中老年健康伴侣
- 189元Ticwatch GTK智能手表上手评测:颜值、运动、电量集一身,香
- 创业|赢了!全球智能手表出货量:华为苹果NO.1三星垫底华为销量猛增
- 剧透:戚薇马天宇《你好,安怡》聚焦2035年人工智能,你期待吗?
- 联想又有一款机型即将升级到安卓12底层了|全球首发骁龙870 摩托神机edge s即将升级安卓12
- 据上海证券报消息|舒适度超埃尔法 华为、小康打造的问界M7智能豪车7月4日发布