力敏|斯巴拓六维力传感器在工业机器人打磨和装配领域的应用( 二 )
广义六维力传感器能够检查空间任意力系中的三维正交力(fx、fy、fz)及三维正交力矩(mx、my、mz),由于其测力信息丰富、测量精度高等特点,主要应用在力及力-位控制场合,六维力/力矩传感器为机器人控制提供力感信息,是智能机器人重要的传感器。
六维力传感器研究现状
国际上对多维力传感器的研究是从20世纪70年代初开始的,主要研究单位有美国的DRAPER实验室、 SRI (Stanford Research Institute,斯坦福研究所)、JPL实验室、IBM公司和日本的日立公司、东京大学等单位。
国内对六维力传感器的研究是在上世纪80年代初期开始的,中科院合肥智能机械研究所于1987 年研制出我国第一台六维腕力传感器,之后陆续有哈尔滨工业大学、华中理工大学、东南大学等单位研制出多种规格的多维力/力矩传感器,展现了我国多维力/力矩信息获取研究领域的蓬勃发展态势。目前在六维力传感器研究较多的院校有燕山大学、哈工大,大连理工等。
文章插图
斯巴拓六维力传感器在工业机器人打磨和装配领域的应用
近年,研究热点更多的关注在多维力/力矩传感器的应用领域,如现代工业机器人怎么样充分利用多维力/力矩传感器以及其它感知系统来完成各种环境下更多更复杂的机器人作业,使工作更加精确、生产效率更高、成本更低;如将多维力/力矩传感器利用到工业机器人自动装配生产线,结合更实时更有效的算法,使智能工业机器人能够更好的进行精密柔性机械装配、轮廓跟踪等作业。
在六维力传感器研究中,力敏元件的结构设计是力传感器的关键核心问题,因为力敏元件的结构决定力传感器的性能优劣。对此,国际和国内许多学者进行了大量的研究工作,提出了多种六维力传感器结构,如下图展示: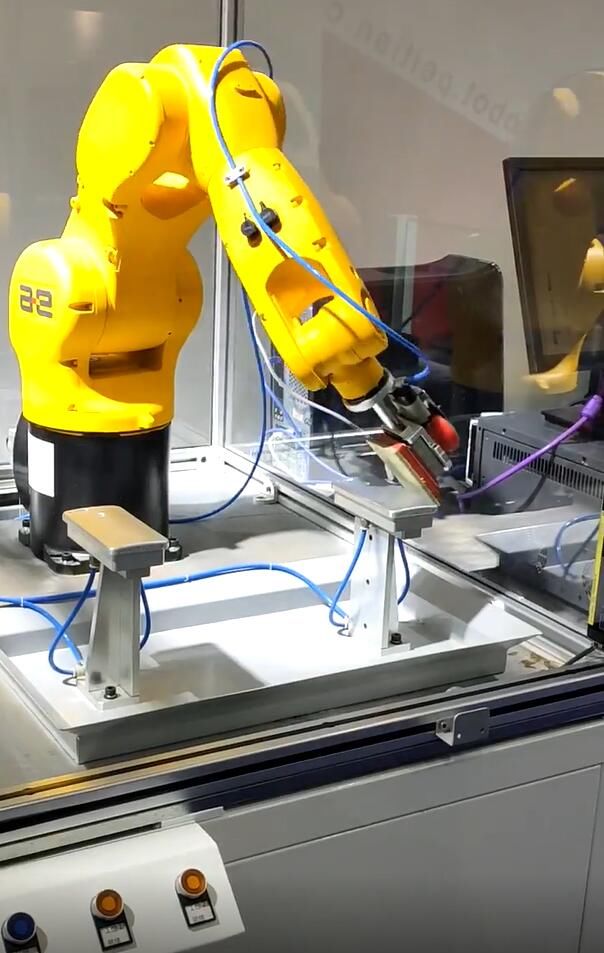
文章插图
斯巴拓六维力传感器在工业机器人打磨和装配领域的应用
工业打磨中的六维力传感器
六维力传感器在工业级的主要运用领域是装配和打磨,打磨是机器人运用很广泛的一个领域,就目前的市场情况来看,对于打磨精度要求较高的行业主要是3C行业,而且3C行业劳动密集度高,迫切需要实现自动化改造。再加上3C行业的柔性化需求,需要更高智能的打磨机器人才能更好的满足市场需求。
六维力传感器通过传感器固定座与机械臂的末端关节固定连接。静态条件下,机械手腕部六维力传感器测得的力和力矩数据由三部分组成,即传感器自身系统误差、负载重力作用、负载所受外部接触力。在加工、装配等工业机器人应用中,机器人末端工具或工件与外界环境的接触力需要被精确的感知,控制系统据此修改机器人的运动,才能保证作业的柔顺性。
文章插图
传感器的市场挑战
虽然六维力传感器在机器人自由度上可以达到六个维度的自由度,大大提升机器人的智能水平,但是目前工业领域市场上的使用情况并不是很乐观,特别是国内市场用到六维力传感器的打磨机器人产品并不是很多。
目前用到浮动主轴的方式比较多,单维力控。原因主要有两个方面:1、在对精密打磨要求不高的行业,目前的力传感器就能满足打磨工序的需要,企业不愿意花更大的代价去购买配置了六维力传感器的打磨设备;2、目前六维力传感器的价格相对昂贵,更新改造成本较高。
传感器的市场机遇
随着工业加工、制造业的发展越来越精细化,精密装配行业如3C行业对生产机器人的要求也会提高,具备更高性能的传感器如六维力传感器也将迎来新的发展机遇。目前超过 90%的工业自动化作业是传统机器人无法完成的,包括精密打磨、精密装配、机械管理、备料、装货卸货、包装等还未实现完全自动化。人机协作机器人可以部分弥补传统工业机器人的不足,完成机械管理等工作。2015年全球机器人行业及相关服务市场规模为710亿元,预计 2019 年可达 320 亿美元。六维力传感器作为人机协作机器人的重要部件,在人机协作应用中发挥着至关重要的作用。
- 抖音怎么一键群发消息给私信
- 微信|马斯克表示希望将推特用户数量拓展至10亿, 复制微信模式会取得成功
- 奥拓电子|刹不住车?爆腾讯下半年将继续大规模裁员
- 京东方|抚松万良举办电商培训,为“人参”拓渠
- 北京市|36氪首发|云原生数据库公司「拓数派」完成新一轮战略融资,估值已达准独角兽级别
- exynos|三星Galaxy F52:6400万四摄+1TB拓展,跌至1299
- 手机SD卡拓展重要吗?最新调查出炉 看看老外怎么说
- Michael Bronstein从代数拓扑学取经,提出了一种新的图神经网络计算结构!
- 内存|手机SD卡拓展重要吗?最新调查出炉 看看老外怎么说
- OLED|东芝电视力拓高端市场,不再“单恋”OLED