
文章插图

文章插图

文章插图
文章插图
美国陆军“多域作战”概念及相关的自主系统战略均提出了对地面无人车和空中无人机等异构无人系统混编团队的需求。为此,美国陆军发起了分布式与协作智能系统和技术(DCIST)协作研究联盟(CRA)计划,旨在聚集学术界的顶尖学者和研究团队,对异构集群内各无人系统的移动、筹划和通信的核心策略进行研究,从而推动能够相互协作的异构无人作战编队的发展。
分布式与协作智能系统和技术(DCIST)协作研究联盟(CRA)计划
不同类型的无人系统有各自适合的任务领域。例如,无人机可能会比地面无人车更擅长穿越障碍物,但地面无人车可能比无人机更适合远距离机动。美国陆军领导人认为,下一阶段的战争将需要能够动态适应环境挑战的无人系统混编团队的支持。若要实现不同类型自主系统的协同,则需要一种能够告诉编队内每个系统平台如何移动、筹划和通信的核心策略。为了填补这一技术空白,美国陆军作战能力发展司令部下辖的陆军研究实验室启动了分布式与协作智能系统和技术(DCIST)协作研究联盟(CRA)计划。
DCIST协作联盟项目经理Brett Piekarski表示,美国陆军许多与“多域作战”概念相关的路线图和自主系统战略文件都依赖于空中和地面自主系统的异构混编。目前,美国陆军研究实验室在机器人协作技术联盟和微自主系统协作技术联盟方面做了很多很好的工作,但在自主系统协作方面仍然存在技术空白。美国陆军认为,自主系统协作是实现陆军未来作战概念的关键要素。协作技术联盟是陆军、私营企业和学术界之间合作的桥梁,专注于创新型科学技术的快速转化,以解决陆军的实际需求。
DCIST CRA与全美学术界的领军者合作,旨在引领能够在未来复杂、高对抗的“多域作战”环境中扩展机动范围、增强态势感知并提高作战效能的科学技术。DCIST项目专门研究分布式智能、异构群组控制、自适应和韧性行为,以及结合所有三个研究领域的跨学科实验。鉴于该项目的规模和范围,在协作研究联盟下取得的综合进展可以显著加快陆军在未来战场上取得技术优势的速度。
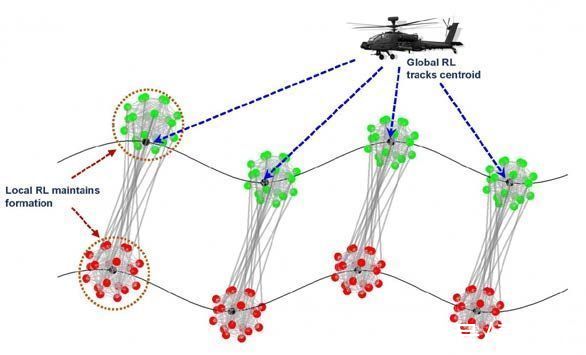
来自DCIST项目自适应和韧性行为部门的团队在今年的电气和电子工程师协会(IEEE)机器人与自动化国际会议上展示了一种新型分布式智能框架。该框架得到了波音公司的支持,引入了一种称为分布式局部搜索的新式分布式信息收集方法,使无人系统编队在信息获取和能源成本之间达到最佳的平衡状态,标志着DCIST项目达到了新的里程碑。
宾夕法尼亚大学电气和系统工程学院教授、研究团队负责人George Pappas表示,目前的分布式搜索方法大多是派出一支无人系统编队,让其中的每个无人系统都像蚂蚁一样执行小区域内的就近目标搜索。研究团队要解决的问题是,确定如何使无人系统集群成为更具战略性的团队,从更长远的角度思考并寻找更远的目标。这是第一次在此类问题中真正考虑能源成本等因素,因而引入了一类需要解决的新的优化问题。
早期的“坐标下降算法”
为了完成重要的陆军任务,自主无人系统编队需要一种可以最大限度地发挥集群中每个平台的能力,而不会将能源或时间浪费在不必要的行动上的策略。集中式方法可以对无人系统集群提供很大程度的控制,但是仅通过一个指挥站指挥机器人的行为会使作战行动容易受到单点故障的影响。采用每个无人系统对其自身运动进行规划的分布式方法能够在应对此类风险时具有更高的韧性,但完全缺乏协调将导致浪费团队资源的多余行动。
- Flyme|“国产系统之光”Flyme迎来十周年,纪念海报上线引发热议
- ColorOS|绿厂又在憋大招?新系统和新产品接踵而至
- 华为鸿蒙系统|鸿蒙3.0即将推送,Mate 50首发
- 物流|科技赋能封管控区,无人车助力物流配送
- 苹果|外观抄苹果、系统用华为?玩了这台乐视“山寨机”我又窒息了
- 华为|长安华为打造, 鸿蒙系统加持!阿维塔11正式官宣,3.98秒破百!
- 华为鸿蒙系统|意欲何为?国内两大科技巨头弃用华为鸿蒙,自研新系统
- 无人驾驶|189元Ticwatch GTK智能手表上手评测:颜值、运动、电量集一身,香
- 放射性跟踪同位素?调整步态躲避天眼系统?暴风眼高科技层出不穷
- 互联互通|哪些无人机适合新手使用?从普宙O2到大疆Mini 3 Pro,一文读懂