目前自动驾驶系统所采用的方案一定会包含融合。传统方式就是目标级的后融合,车上装载很多传感器,包括激光雷达、摄像头,整车开发完之后会跑一个相对复杂的硬件标定流程,把多传感器坐标系转换、互相之间的对应关系找到,匹配算法,保证匹配的精度。未来想要实现的安全性以及自动驾驶系统舒适性的问题,还是需要融合的技术帮助感知系统更准确地捕捉外面的世界。

文章插图
场景演示
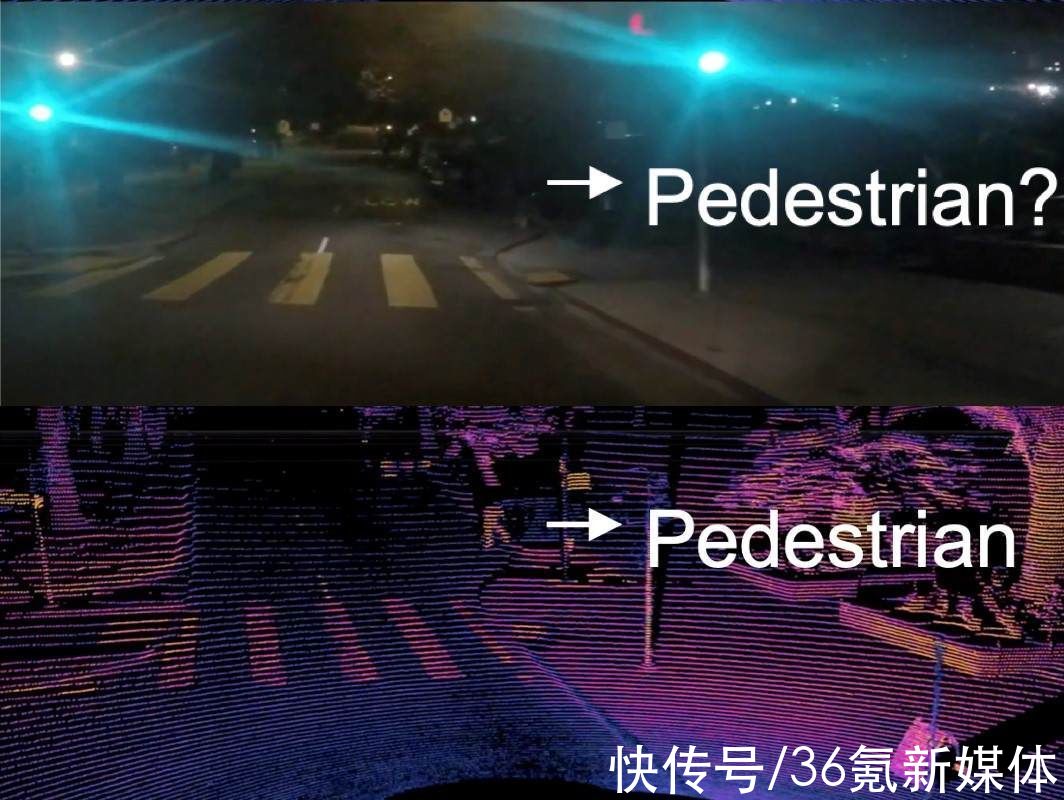
上面给出了几个后融合方案容易出问题的场景。第一是物检测,地面上有一些图形,对于摄像头来说会做出正常的检测,确实有一个人的形状,但是LiDAR是无法检出,后融合会大概率信赖图像输出,最终导致停车和绕障,这就是影响自动驾驶系统用户体验的物检测场景。
文章插图
激光雷达
右边是一些漏检测,包括光照不好、环境条件不适合的情况下,图像或者激光雷达都很容易出现漏检测,带来很多安全性的隐患。
文章插图
场景演示
最近有很多研究者从事一些恶意攻击等技术研究,可以通过一些特殊设计,针对激光雷达和图像的机器学习网络,可以做一些反向优化,致使LiDAR和Camera在独立识别中同时失效。如果是前融合系统,在抗冲击上也有更好的安全性和稳定性。
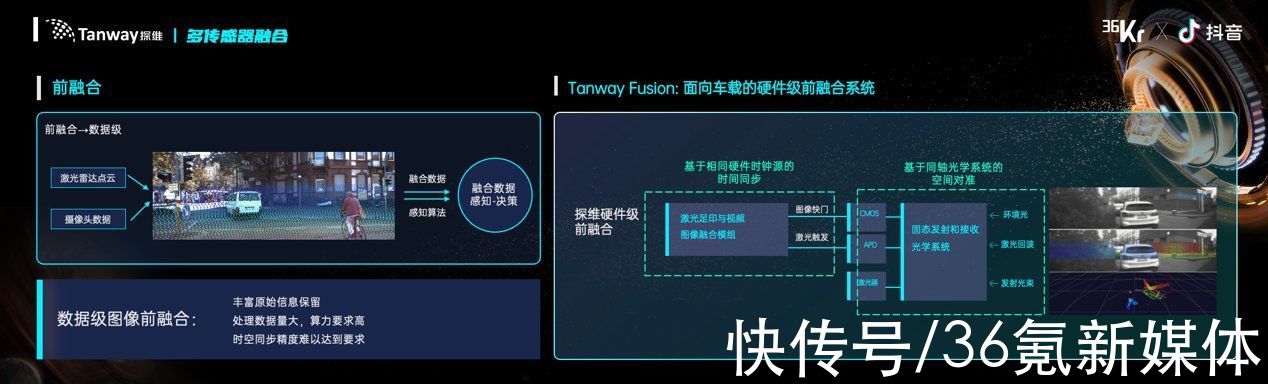
所谓的前融合就是要在数据层面把图像和激光点云做到点点对应,做到深度匹配。如果想基于多传感器系统实现前融合,对于标定的精度、时间同步的精度都提出了非常高的要求,探维科技的解决方案是一整套基于硬件、基于同轴光学系统的图像融合的方案。我们直接把CMOS传感器和APD的激光传感器整合到同一套光学系统当中,从原有数据采集的那一刻,所有激光点云和视频像素都是互相匹配的,由于我们用的是同一个硬件系统驱动,时间同步可以很轻松地做到微秒量级。
文章插图
前融合
如图,我们很好地发挥了激光和环境感知的优点,同时可以很好地匹配前融合算法,让整个感知精度有幅度地提升。最后一点,在硬件层面最底层逻辑上,可以让激光和图像感知系统轻松地超越人眼感知,发挥图像对于高分辨率的优势和激光点云测距精度准的优势,通过中等规模的激光雷达线束匹配高清的摄像头,让我们在不降低甚至是提升感知精度的情况下,保证硬件配置和硬件成本,做到最优的效果。
文章插图
探维科技核心产品
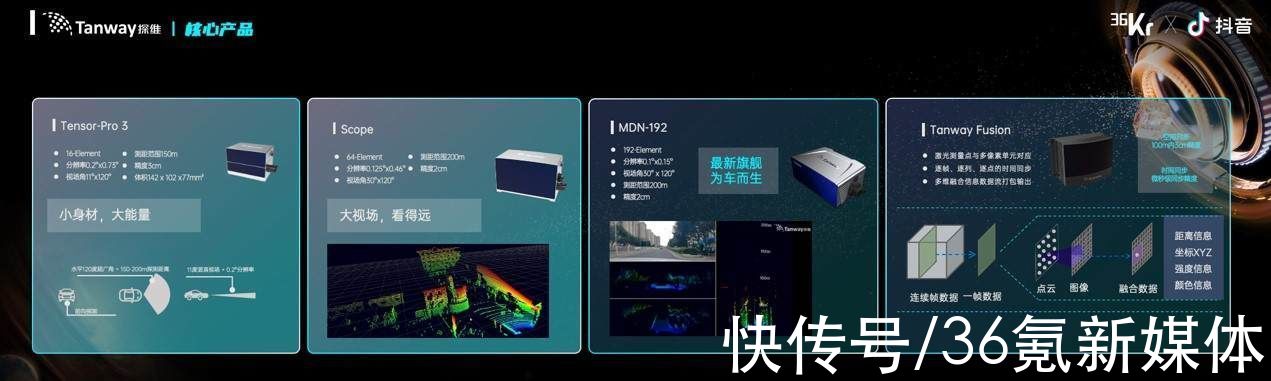
后面再看一下探维科技所提供的一些产品和应用情况。Tensor-Pro和Scope以及MDN-192都是我们基于单轴微电极系统所提供的量产激光雷达产品,分别是16、64线和192线。最右边是我们的融合产品,给客户交付融合在一起的激光点云和视频图像,所有图像都可以点点对应匹配,而且时间同步精度做到逐列的时间对准。

文章插图
探维科技CEO&创始人王世玮
如图是探维科技提供的工程化量产能力,我们在苏州有车规产线,把整机单台生产时间控制在60秒,产能20万台,是一个标准的车规级量产基地。
目前我们的应用领域包括低速自动驾驶、无人物流、清洁、配送,我们的激光雷达能提供L4级别的无人导航、避障等功能。而在车路协同领域也是我们探维科技最早提供量产产品的一些应用场景,包括智能ETC、智慧交通、车路协同、新能源和交通事件的检测,也都是我们激光雷达所能提供的感知功能。
- 笔记本|双芯协同!上手Reno8 Pro花仙紫,氛围感人像神器稳了
- 鸿蒙的跨屏协同,安卓也可拥有
- 火绒|火绒安全与英特尔vPro平台合作 共筑软硬件协同安全新格局
- 苹果|苹果华为小米vivo 大厂的“多屏协同”究竟都有啥不同?
- 汽车数智化之V2X车路协同加速智慧交通与智能驾驶发展
- 供应链管理|36氪首发|定位供应链协同平台,「甄一科技」完成7000万元A轮融资
- 机器人开发软硬件如何协同,听听开发者怎么说?
- 后疫情时代 TCL商显新品如何构建协同生态 赋能混合办公
- 云端协同 AOC 8核芯片会议平板618超值上市
- “十四五”3万亿元投入电网转型升级 志翔科技打造云边协同电力