算法|地平线蝉联Waymo挑战赛桂冠,顶级算法能力为赛道领跑保驾护航
近日,2021年 Waymo 开放数据集挑战赛落下帷幕,地平线团队提交的AFDetV2模型夺得实时3D检测项目第一名的殊荣,另一模型AFDetV2-Base则获评为Most Efficient Model。继2020年荣获5项挑战中的4项全球第一后,地平线凭借蝉联的优异成绩,再次证明了自己领先的算法能力。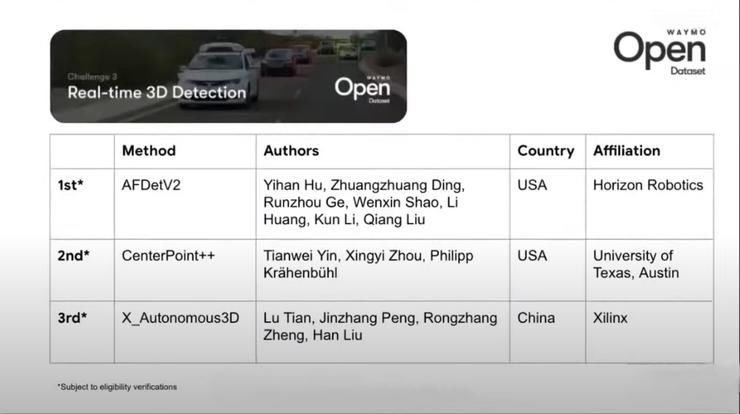
文章插图
顶级赛事再获殊荣,视觉感知技术世界领先CVPR是计算机视觉领域的全球三大顶级会议之一,旗下的WAD (Workshop on Autonomous Driving) 2021年再度举办了Waymo开放数数据集挑战赛,聚焦计算机视觉算法在解决自动驾驶环境感知问题方面的进展。挑战赛提供大量带有精细标注的大规模数据集,基于数据集定义出几个现实问题,鼓励参赛者们进行算法和pipeline上的创新。
Waymo挑战赛一直以来都以数据来源真实驾驶场景、数据规模庞大、任务难度高而著称。其提供的数据集中包含超过10万个城市真实场景,高达574小时的自动驾驶道路数据。今年更是吸引了来自学术界和产业界的30余支自动驾驶研发团队参与,其中不乏华为、清华、滴滴、图森、赛灵思、伯克利、南洋理工大学这样的顶尖选手。
挑战赛设置的实时3D检测项目,要求选手基于三个激光雷达范围图像和相关的相机图像,为场景中的对象生成一组3D直立框。与去年不同的是,今年的检测项目还加入了实时性的要求,规定所有模型的执行时间必须要小于70ms才能入围,同时精度需要保持在70APH以上。这极大地提高了项目的评定标准,增加了竞赛难度。
可以说,此次项目竞争之激烈,数据之庞杂,标准之严苛都令人惊叹。而正是在这样的重重挑战下,地平线感知算法团队不负众望,再度斩获殊荣。
凭借对3D物体检测的多年的技术积累,地平线斩获实时3D检测项目第一名的AFDetV2 达到了73.12mAPH/L2的精度、60.06ms的延迟,不仅符合实时性的要求,且精度最高。另一模型AFDetV2-base则凭借72.57mAPH/L2的精度和55.86ms的延迟,成为了精度大于70APH的模型中最快的一个,收获Most Efficient Model称号。
正如地平线CEO余凯曾经提到的那样,“无论是ImageNet、KITTI还是Waymo自动驾驶算法大赛,这些大赛里拿第一名的中国人都来自地平线团队”,2020年获奖的模型至今仍是Waymo竞赛榜单(LeaderBoard)上检测精度最高的模型。竞赛挑战难度的升级从来不是阻碍,而是自我突破的契机,领先的算法实力来自于对行业前沿阵地的不懈耕耘。地平线不愧为“最懂算法的芯片公司”。
创新性运用SOTA算法,最有效利用计算资源实现性能与功耗的平衡作为边缘AI芯片的全球领导者,地平线的商业模式不是卖芯片,而是把以“算法+芯片”为核心的嵌入式人工智能解决方案,提供给合作伙伴。
芯片单纯比拼算力的时代已经过去,余凯曾说:“一些计算处理器盲目追求最高计算能力,但同时也会带来高功耗的问题,而在智能电动汽车中,高功耗就意味着里程损失。时至今日,我们正在逼近原子的极限,单靠物理制程已不能继续推进摩尔定律往前发展,而是需要靠场景跟任务、软件算法去驱动”。只PK硬件的逻辑已不适用于推进产品迭代,芯片行业对“软”实力的需求与日俱增。因此,地平线选择了“算法+芯片”软硬结合的商业模式。余凯不止一次强调软件协作在其中的重要性,芯片的目的是在上面运行软件,最大限度地提高软件的效率。因此,必须在手段和目的之间实现高度匹配,而且它必须是一个系统级的设计,以使它成为最有效的。
地平线顶级的算法能力,除去竞赛中亮眼的数据,还体现在其对芯片做出的有效提升上。一个芯片的好坏需要通过PPA(Performance、Power、Area)这三个方面来考量:单纯性能好是不够的,如果功耗高、面积大,芯片依旧没有优势。而地平线正是通过算法优化,做到了在同等性能下,计算更少,功耗更低,成本更小。
- 社交|腾讯视频为IP编写「价值算法」
- 新书推荐 │ 大数据算法设计与分析
- 算法|75英寸最值得入手的大屏电视,性能画质没得挑
- 算法|“赞奇科技”获得数千万元战略投资
- 中国移动|中国移动新一代超级SIM卡芯片来了:2MB存储、算法翻3倍
- 算法|为什么你只是说了某样东西,手机就会给你推送相关商品?几步教你轻松解决!
- 为了抢用户,Facebook要改算法了
- 算法|侃侃而谈| 为什么视频网站必然走向兼并整合?
- 算法|魅族19官方预热:部分配置曝光,首批渲染图出炉!
- 阿尔茨海默病|机器学习新算法:一次脑扫描就能诊断阿尔茨海默病